
Efficient and Robust Coordination of Autonomous Vehicle Platoons in Signal-Free Urban Networks
/Abstract
Integration of artificial intelligence and wireless communication technologies in autonomous vehicles (AVs) enables coordination of AV platoons at urban intersections. The efficiency of the platoon coordination process can be improved by reducing the spacing between successive platoons to increase capacity; however, such improvement in efficiency can have adverse impacts on the robustness of the coordination process. In this research, we enhance the performance of urban networks by balancing efficiency and robustness in the platoon coordination process at signal-free smart intersections. We develop a stochastic model for the coordinated movement of AV platoons at signal-free smart intersections. The proposed model is based on a rule-based coordination process designed to synchronize the arrival and departure of consecutive platoons in crossing directions. We derive the platoon synchronization success probability for a general statistical distribution of the operational error and formulate the intersection capacity as a function of the synchronization success probability. To maximize the performance of the system, we optimize the efficiency and robustness of the coordination process by adjusting the spacing between successive platoons. We assess the resulting improvement in the performance at the network level using the automated network fundamental diagram, an analytical modeling tool developed based on the concept of the macroscopic fundamental diagram. We evaluate the analytical results of the research using a double-ring simulation model. The numerical results of the research show that optimizing the system by adjusting the platoon spacing can improve robustness by 13% at the cost of a 4% reduction in network capacity.
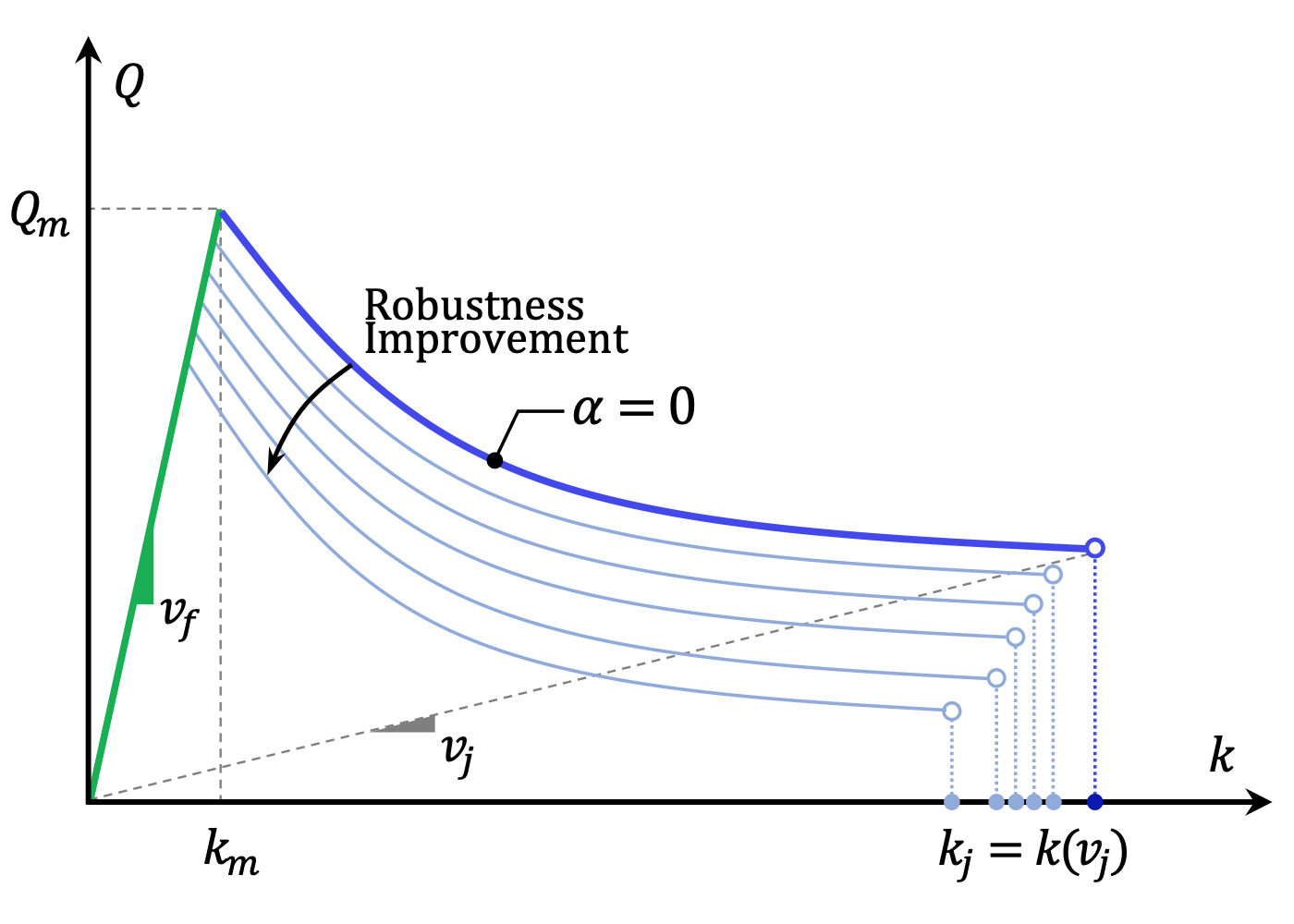
Automated network fundamental diagram (ANFD)